
| (prev) | (top) | (next) |
If the object has high velocity, the drag force is proportional to the square of the speed.
We will assume that our springs are massless. Note that a spring exerts the same magnitude of force on each end, but in opposite directions.
Consider the following contraption:
Note that x4 is measured parallel to the incline, and that we have assumed that the spring is extended (x4 is negative) so that
the force due to the spring is pulling m4 down the incline.
This system of equations is actually a complicated set of differential equations, and is an example of how much easier it is to write down equations
in physics than it is to solve them. To make the problem more tractable, we will make the surfaces frictionless (by setting μ to 0), empty the fluid to
remove bouyancy and drag (by setting ρ and b to 0), and remove both m3 and the spring (by setting m3 and k to 0). The resulting
system is a set of three linear equations in three variables (T1, T2 and a), with the solution
As long as b and k are zero, this system is still a set of linear equations which we can solve. But if ρ, μ or m3 are nonzero,
we must look carefully at the signs. For μ > 0, the solution is
Consider an object undergoing centripetal motion on a banked track of incline angle θ:
Fparallel = m v2 cos θ / r - m g sin θ - μ N
Forces
p ≡ m v,
the force experienced by an object (measured in Newtons: 1 N ≡ 1 kg m/s2) is
F ≡ dp/dt
= dm/dt v + m a
We will refer to this equation as "Newton's laws". In most cases, dm/dt = 0.
This is the force of gravity near the Earth's surface.
FN is the normal force, perpendicular to the surface on which an object moves (or rests). If an
object has a non-zero component of acceleration in the same direction as gravity, the normal force will be the effective weight of the object.
This is the force due to friction, acting in the opposite direction of motion.
μ is the coefficient of friction
(static coefficient of friction if the object is not moving,
kinetic coefficient of friction if it is).
This is the buoyant force exerted by a fluid on a sinking object. ρ is the density of the fluid and V is the volume
of the object, so the magnitude of the force is equal to the weight of the displaced fluid (Archimedes' principle).
This is the force of drag experienced by an object slowly moving in a fluid; b is the
drag coefficient.
This is the force exerted by a spring.
k is the spring constant
and Δx is the displacement from equilibrium
(where the spring is not stretched). This is known as Hooke's law.
For every direction in which any force acts and the component of acceleration is zero, there must be more than one force acting along that direction!
Then write the vector component equations for Newton's laws for each object or point of connection.
Make sure that the relative signs of the forces and the accelerations make physical sense.
State specifically the direction of motion associated with positive acceleration for each object under consideration.
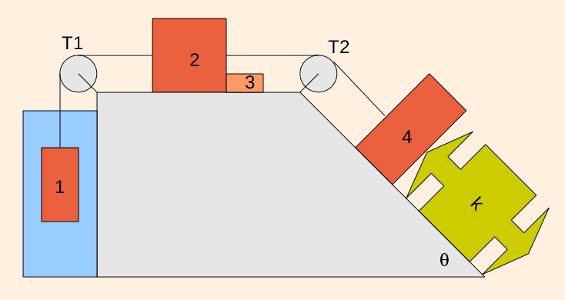
Assuming the motion is to the right, and that all ropes remain taut, Newton's laws are then:
mass x y parallel to the incline normal to the incline m1 T1 - m1 g + ρ V g - b v = m1 a m2 T2 - T1 - μ N2 - F23 = m2 a
N2 - m2 g = 0 m3 F23 - μ N3 = m3 a
N3 - m3 g = 0 m4 k (x0 - x4) + m4 g sin θ - μ N4 - T2 =
m4 a N4 - m4 g cos θ = 0
Note that a > 0 corresponds to motion to the right, so if m1 > m4 sin θ, the direction of motion is reversed. And if
m1 = m4 sin θ, the system is in equilibrium: the net forces are zero.
Now there are values of μ as well as θ which can stop the motion. Note, however, that no value of μ can reverse the motion!
N = m g cos θ - m v2 sin θ / r
If the object is not to skid, we must have Fparallel = 0, or
tan θ = (v2 - μ g r) / (g r - μ v2).
In the limit θ = 0, the no-slip condition yields
μ = v2 / (g r).
| (prev) | (top) | (next) |
©2010, Kenneth R. Koehler. All Rights Reserved. This document may be freely reproduced provided that this copyright notice is included.
Please send comments or suggestions to the author.